MPU6050 Interfacing With Arduino UNO
Introduction
 MPU6050 Module
MPU6050 Module
MPU6050 sensor module is an integrated 6-axis Motion tracking device.
It has a 3-axis Gyroscope, 3-axis Accelerometer, Digital Motion Processor and a Temperature sensor, all in a single IC.
It can accept inputs from other sensors like 3-axis magnetometer or pressure sensor using its Auxiliary I2C bus.
If external 3-axis magnetometer is connected, it can provide complete 9-axis Motion Fusion output.
A microcontroller can communicate with this module using I2C communication protocol. Various parameters can be found by reading values from addresses of certain registers using I2C communication.
Gyroscope and accelerometer reading along X, Y and Z axes are available in 2’s complement form. Temperature reading is also available in signed integer form.
Gyroscope readings are in degrees per second (dps) unit; Accelerometer readings are in g unit; and Temperature reading is in degrees Celsius.
For more information about MPU6050 Sensor Module and how to use it, refer the topic MPU6050 Sensor Module in the sensors and modules section.
MPU6050 Module
MPU6050 sensor module is an integrated 6-axis Motion tracking device.
It has a 3-axis Gyroscope, 3-axis Accelerometer, Digital Motion Processor and a Temperature sensor, all in a single IC.
It can accept inputs from other sensors like 3-axis magnetometer or pressure sensor using its Auxiliary I2C bus.
If external 3-axis magnetometer is connected, it can provide complete 9-axis Motion Fusion output.
A microcontroller can communicate with this module using I2C communication protocol. Various parameters can be found by reading values from addresses of certain registers using I2C communication.
Gyroscope and accelerometer reading along X, Y and Z axes are available in 2’s complement form. Temperature reading is also available in signed integer form.
Gyroscope readings are in degrees per second (dps) unit; Accelerometer readings are in g unit; and Temperature reading is in degrees Celsius.
For more information about MPU6050 Sensor Module and how to use it, refer the topic MPU6050 Sensor Module in the sensors and modules section.
Interfacing Diagram
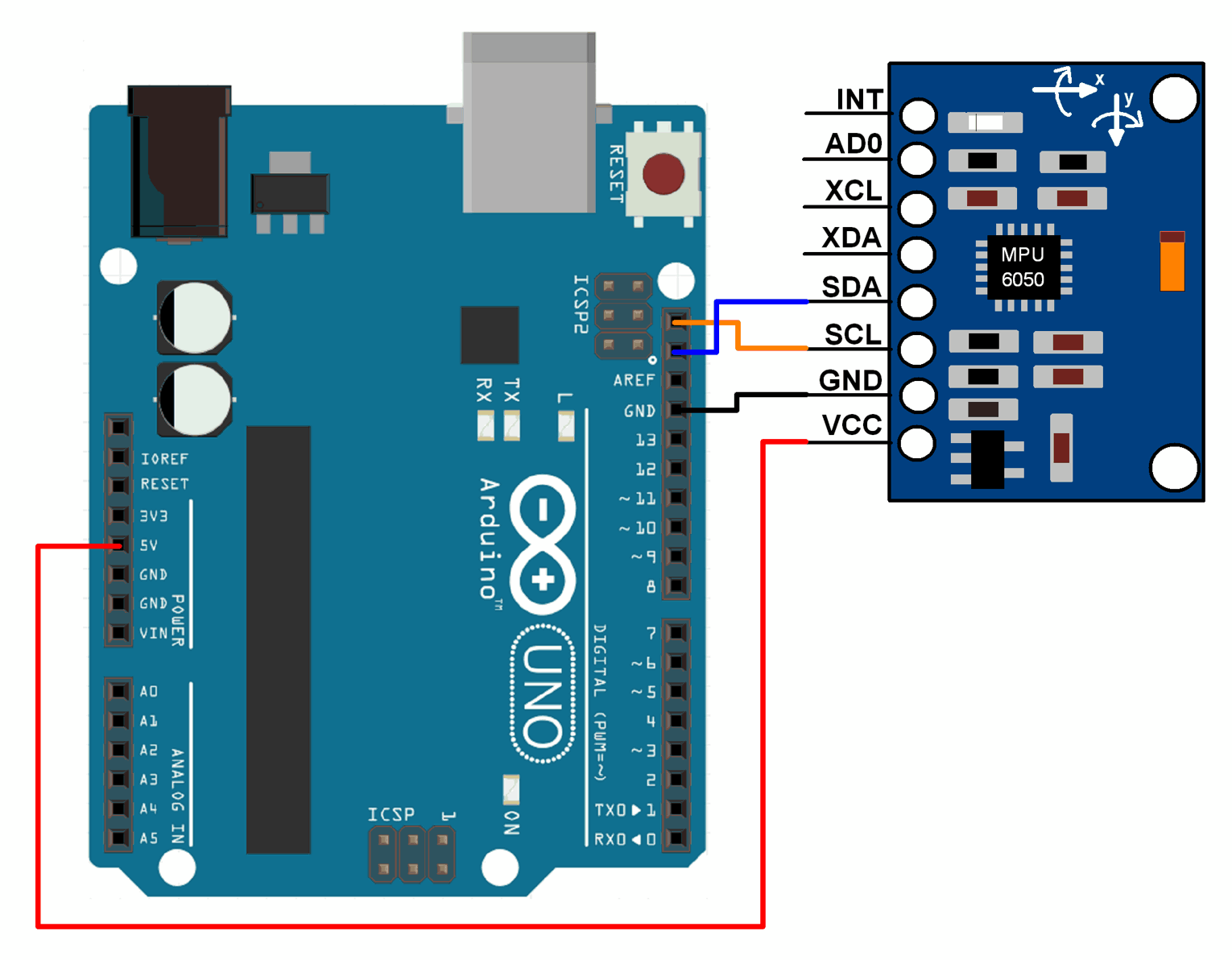 Interfacing MPU6050 Module With Arduino UNO
Interfacing MPU6050 Module With Arduino UNO
Interfacing MPU6050 Module With Arduino UNOExample
Reading Accelerometer, Gyroscope and Temperature parameters from the MPU6050 module and displaying them on Arduino Serial Monitor.
Here, we will be using Korneliusz Jarzebski’s MPU6050 library from GitHub.
Extract the library and add it to the libraries folder path of Arduino IDE.
For information about how to add a custom library to the Arduino IDE and use examples from it, refer Adding Library To Arduino IDE in the Basics section.
Once the library has been added to the Arduino IDE, open the IDE and open the example sketch you want from the list of examples from the library added.
Reading Accelerometer, Gyroscope and Temperature parameters from the MPU6050 module and displaying them on Arduino Serial Monitor.
Here, we will be using Korneliusz Jarzebski’s MPU6050 library from GitHub.
Extract the library and add it to the libraries folder path of Arduino IDE.
For information about how to add a custom library to the Arduino IDE and use examples from it, refer Adding Library To Arduino IDE in the Basics section.
Once the library has been added to the Arduino IDE, open the IDE and open the example sketch you want from the list of examples from the library added.
Sketch For Simple Accelerometer Measurements
/*
MPU6050 Triple Axis Gyroscope & Accelerometer. Simple Accelerometer Example.
Read more: http://www.jarzebski.pl/arduino/czujniki-i-sensory/3-osiowy-zyroskop-i-akcelerometr-mpu6050.html
GIT: https://github.com/jarzebski/Arduino-MPU6050
Web: http://www.jarzebski.pl
(c) 2014 by Korneliusz Jarzebski
*/
#include <Wire.h>
#include <MPU6050.h>
MPU6050 mpu;
void setup()
{
Serial.begin(115200);
Serial.println("Initialize MPU6050");
while(!mpu.begin(MPU6050_SCALE_2000DPS, MPU6050_RANGE_2G))
{
Serial.println("Could not find a valid MPU6050 sensor, check wiring!");
delay(500);
}
// If you want, you can set accelerometer offsets
// mpu.setAccelOffsetX();
// mpu.setAccelOffsetY();
// mpu.setAccelOffsetZ();
checkSettings();
}
void checkSettings()
{
Serial.println();
Serial.print(" * Sleep Mode: ");
Serial.println(mpu.getSleepEnabled() ? "Enabled" : "Disabled");
Serial.print(" * Clock Source: ");
switch(mpu.getClockSource())
{
case MPU6050_CLOCK_KEEP_RESET: Serial.println("Stops the clock and keeps the timing generator in reset"); break;
case MPU6050_CLOCK_EXTERNAL_19MHZ: Serial.println("PLL with external 19.2MHz reference"); break;
case MPU6050_CLOCK_EXTERNAL_32KHZ: Serial.println("PLL with external 32.768kHz reference"); break;
case MPU6050_CLOCK_PLL_ZGYRO: Serial.println("PLL with Z axis gyroscope reference"); break;
case MPU6050_CLOCK_PLL_YGYRO: Serial.println("PLL with Y axis gyroscope reference"); break;
case MPU6050_CLOCK_PLL_XGYRO: Serial.println("PLL with X axis gyroscope reference"); break;
case MPU6050_CLOCK_INTERNAL_8MHZ: Serial.println("Internal 8MHz oscillator"); break;
}
Serial.print(" * Accelerometer: ");
switch(mpu.getRange())
{
case MPU6050_RANGE_16G: Serial.println("+/- 16 g"); break;
case MPU6050_RANGE_8G: Serial.println("+/- 8 g"); break;
case MPU6050_RANGE_4G: Serial.println("+/- 4 g"); break;
case MPU6050_RANGE_2G: Serial.println("+/- 2 g"); break;
}
Serial.print(" * Accelerometer offsets: ");
Serial.print(mpu.getAccelOffsetX());
Serial.print(" / ");
Serial.print(mpu.getAccelOffsetY());
Serial.print(" / ");
Serial.println(mpu.getAccelOffsetZ());
Serial.println();
}
void loop()
{
Vector rawAccel = mpu.readRawAccel();
Vector normAccel = mpu.readNormalizeAccel();
Serial.print(" Xraw = ");
Serial.print(rawAccel.XAxis);
Serial.print(" Yraw = ");
Serial.print(rawAccel.YAxis);
Serial.print(" Zraw = ");
Serial.println(rawAccel.ZAxis);
Serial.print(" Xnorm = ");
Serial.print(normAccel.XAxis);
Serial.print(" Ynorm = ");
Serial.print(normAccel.YAxis);
Serial.print(" Znorm = ");
Serial.println(normAccel.ZAxis);
delay(10);
}
/*
MPU6050 Triple Axis Gyroscope & Accelerometer. Simple Accelerometer Example.
Read more: http://www.jarzebski.pl/arduino/czujniki-i-sensory/3-osiowy-zyroskop-i-akcelerometr-mpu6050.html
GIT: https://github.com/jarzebski/Arduino-MPU6050
Web: http://www.jarzebski.pl
(c) 2014 by Korneliusz Jarzebski
*/
#include <Wire.h>
#include <MPU6050.h>
MPU6050 mpu;
void setup()
{
Serial.begin(115200);
Serial.println("Initialize MPU6050");
while(!mpu.begin(MPU6050_SCALE_2000DPS, MPU6050_RANGE_2G))
{
Serial.println("Could not find a valid MPU6050 sensor, check wiring!");
delay(500);
}
// If you want, you can set accelerometer offsets
// mpu.setAccelOffsetX();
// mpu.setAccelOffsetY();
// mpu.setAccelOffsetZ();
checkSettings();
}
void checkSettings()
{
Serial.println();
Serial.print(" * Sleep Mode: ");
Serial.println(mpu.getSleepEnabled() ? "Enabled" : "Disabled");
Serial.print(" * Clock Source: ");
switch(mpu.getClockSource())
{
case MPU6050_CLOCK_KEEP_RESET: Serial.println("Stops the clock and keeps the timing generator in reset"); break;
case MPU6050_CLOCK_EXTERNAL_19MHZ: Serial.println("PLL with external 19.2MHz reference"); break;
case MPU6050_CLOCK_EXTERNAL_32KHZ: Serial.println("PLL with external 32.768kHz reference"); break;
case MPU6050_CLOCK_PLL_ZGYRO: Serial.println("PLL with Z axis gyroscope reference"); break;
case MPU6050_CLOCK_PLL_YGYRO: Serial.println("PLL with Y axis gyroscope reference"); break;
case MPU6050_CLOCK_PLL_XGYRO: Serial.println("PLL with X axis gyroscope reference"); break;
case MPU6050_CLOCK_INTERNAL_8MHZ: Serial.println("Internal 8MHz oscillator"); break;
}
Serial.print(" * Accelerometer: ");
switch(mpu.getRange())
{
case MPU6050_RANGE_16G: Serial.println("+/- 16 g"); break;
case MPU6050_RANGE_8G: Serial.println("+/- 8 g"); break;
case MPU6050_RANGE_4G: Serial.println("+/- 4 g"); break;
case MPU6050_RANGE_2G: Serial.println("+/- 2 g"); break;
}
Serial.print(" * Accelerometer offsets: ");
Serial.print(mpu.getAccelOffsetX());
Serial.print(" / ");
Serial.print(mpu.getAccelOffsetY());
Serial.print(" / ");
Serial.println(mpu.getAccelOffsetZ());
Serial.println();
}
void loop()
{
Vector rawAccel = mpu.readRawAccel();
Vector normAccel = mpu.readNormalizeAccel();
Serial.print(" Xraw = ");
Serial.print(rawAccel.XAxis);
Serial.print(" Yraw = ");
Serial.print(rawAccel.YAxis);
Serial.print(" Zraw = ");
Serial.println(rawAccel.ZAxis);
Serial.print(" Xnorm = ");
Serial.print(normAccel.XAxis);
Serial.print(" Ynorm = ");
Serial.print(normAccel.YAxis);
Serial.print(" Znorm = ");
Serial.println(normAccel.ZAxis);
delay(10);
}
Functions Used in Accelerometer Sketch
1. mpu.readRawAccel()
- This function gives the decimal equivalent of the 16-bit values of the acceleration in the X, Y and Z directions.
- This does not give the acceleration values in g units.
2. mpu.readNormalizeAccel()
- This function gives the values of the acceleration in the X, Y and Z directions in g units.
- It takes into consideration the range setting chosen for accelerometer and the corresponding sensitivity. Using this it gives acceleration in g units which can vary from 0 to the range chosen.
3. mpu.begin(gyro_scale,accelo_range)
- This function is used to set the range of accelerometer and the scale of gyroscope.
- gyro_scale can be MPU6050_SCALE_250DPS, MPU6050_SCALE_500DPS, MPU6050_SCALE_1000DPS or MPU6050_SCALE_2000DPS for 250 dps, 500 dps, 1000 dps or 2000 dps respectively.
- aceelo_range can be MPU6050_RANGE_2G, MPU6050_RANGE_4G, MPU6050_RANGE_8G or MPU6050_RANGE_16G for measurement range of 2g, 4g, 8g or 16g respectively.
1. mpu.readRawAccel()
- This function gives the decimal equivalent of the 16-bit values of the acceleration in the X, Y and Z directions.
- This does not give the acceleration values in g units.
2. mpu.readNormalizeAccel()
- This function gives the values of the acceleration in the X, Y and Z directions in g units.
- It takes into consideration the range setting chosen for accelerometer and the corresponding sensitivity. Using this it gives acceleration in g units which can vary from 0 to the range chosen.
3. mpu.begin(gyro_scale,accelo_range)
- This function is used to set the range of accelerometer and the scale of gyroscope.
- gyro_scale can be MPU6050_SCALE_250DPS, MPU6050_SCALE_500DPS, MPU6050_SCALE_1000DPS or MPU6050_SCALE_2000DPS for 250 dps, 500 dps, 1000 dps or 2000 dps respectively.
- aceelo_range can be MPU6050_RANGE_2G, MPU6050_RANGE_4G, MPU6050_RANGE_8G or MPU6050_RANGE_16G for measurement range of 2g, 4g, 8g or 16g respectively.
Sketch For Roll and Pitch Measurement Using Accelerometer
/*
MPU6050 Triple Axis Gyroscope & Accelerometer. Pitch & Roll Accelerometer Example.
Read more: http://www.jarzebski.pl/arduino/czujniki-i-sensory/3-osiowy-zyroskop-i-akcelerometr-mpu6050.html
GIT: https://github.com/jarzebski/Arduino-MPU6050
Web: http://www.jarzebski.pl
(c) 2014 by Korneliusz Jarzebski
*/
#include <Wire.h>
#include <MPU6050.h>
MPU6050 mpu;
void setup()
{
Serial.begin(115200);
Serial.println("Initialize MPU6050");
while(!mpu.begin(MPU6050_SCALE_2000DPS, MPU6050_RANGE_2G))
{
Serial.println("Could not find a valid MPU6050 sensor, check wiring!");
delay(500);
}
}
void loop()
{
// Read normalized values
Vector normAccel = mpu.readNormalizeAccel();
// Calculate Pitch & Roll
int pitch = -(atan2(normAccel.XAxis, sqrt(normAccel.YAxis*normAccel.YAxis + normAccel.ZAxis*normAccel.ZAxis))*180.0)/M_PI;
int roll = (atan2(normAccel.YAxis, normAccel.ZAxis)*180.0)/M_PI;
// Output
Serial.print(" Pitch = ");
Serial.print(pitch);
Serial.print(" Roll = ");
Serial.print(roll);
Serial.println();
delay(10);
}
/*
MPU6050 Triple Axis Gyroscope & Accelerometer. Pitch & Roll Accelerometer Example.
Read more: http://www.jarzebski.pl/arduino/czujniki-i-sensory/3-osiowy-zyroskop-i-akcelerometr-mpu6050.html
GIT: https://github.com/jarzebski/Arduino-MPU6050
Web: http://www.jarzebski.pl
(c) 2014 by Korneliusz Jarzebski
*/
#include <Wire.h>
#include <MPU6050.h>
MPU6050 mpu;
void setup()
{
Serial.begin(115200);
Serial.println("Initialize MPU6050");
while(!mpu.begin(MPU6050_SCALE_2000DPS, MPU6050_RANGE_2G))
{
Serial.println("Could not find a valid MPU6050 sensor, check wiring!");
delay(500);
}
}
void loop()
{
// Read normalized values
Vector normAccel = mpu.readNormalizeAccel();
// Calculate Pitch & Roll
int pitch = -(atan2(normAccel.XAxis, sqrt(normAccel.YAxis*normAccel.YAxis + normAccel.ZAxis*normAccel.ZAxis))*180.0)/M_PI;
int roll = (atan2(normAccel.YAxis, normAccel.ZAxis)*180.0)/M_PI;
// Output
Serial.print(" Pitch = ");
Serial.print(pitch);
Serial.print(" Roll = ");
Serial.print(roll);
Serial.println();
delay(10);
}
Sketch For Simple Gyroscope Measurements
/*
MPU6050 Triple Axis Gyroscope & Accelerometer. Simple Gyroscope Example.
Read more: http://www.jarzebski.pl/arduino/czujniki-i-sensory/3-osiowy-zyroskop-i-akcelerometr-mpu6050.html
GIT: https://github.com/jarzebski/Arduino-MPU6050
Web: http://www.jarzebski.pl
(c) 2014 by Korneliusz Jarzebski
*/
#include <Wire.h>
#include <MPU6050.h>
MPU6050 mpu;
void setup()
{
Serial.begin(115200);
// Initialize MPU6050
Serial.println("Initialize MPU6050");
while(!mpu.begin(MPU6050_SCALE_2000DPS, MPU6050_RANGE_2G))
{
Serial.println("Could not find a valid MPU6050 sensor, check wiring!");
delay(500);
}
// If you want, you can set gyroscope offsets
// mpu.setGyroOffsetX(155);
// mpu.setGyroOffsetY(15);
// mpu.setGyroOffsetZ(15);
// Calibrate gyroscope. The calibration must be at rest.
// If you don't want calibrate, comment this line.
mpu.calibrateGyro();
// Set threshold sensivty. Default 3.
// If you don't want use threshold, comment this line or set 0.
// mpu.setThreshold(3);
// Check settings
checkSettings();
}
void checkSettings()
{
Serial.println();
Serial.print(" * Sleep Mode: ");
Serial.println(mpu.getSleepEnabled() ? "Enabled" : "Disabled");
Serial.print(" * Clock Source: ");
switch(mpu.getClockSource())
{
case MPU6050_CLOCK_KEEP_RESET: Serial.println("Stops the clock and keeps the timing generator in reset"); break;
case MPU6050_CLOCK_EXTERNAL_19MHZ: Serial.println("PLL with external 19.2MHz reference"); break;
case MPU6050_CLOCK_EXTERNAL_32KHZ: Serial.println("PLL with external 32.768kHz reference"); break;
case MPU6050_CLOCK_PLL_ZGYRO: Serial.println("PLL with Z axis gyroscope reference"); break;
case MPU6050_CLOCK_PLL_YGYRO: Serial.println("PLL with Y axis gyroscope reference"); break;
case MPU6050_CLOCK_PLL_XGYRO: Serial.println("PLL with X axis gyroscope reference"); break;
case MPU6050_CLOCK_INTERNAL_8MHZ: Serial.println("Internal 8MHz oscillator"); break;
}
Serial.print(" * Gyroscope: ");
switch(mpu.getScale())
{
case MPU6050_SCALE_2000DPS: Serial.println("2000 dps"); break;
case MPU6050_SCALE_1000DPS: Serial.println("1000 dps"); break;
case MPU6050_SCALE_500DPS: Serial.println("500 dps"); break;
case MPU6050_SCALE_250DPS: Serial.println("250 dps"); break;
}
Serial.print(" * Gyroscope offsets: ");
Serial.print(mpu.getGyroOffsetX());
Serial.print(" / ");
Serial.print(mpu.getGyroOffsetY());
Serial.print(" / ");
Serial.println(mpu.getGyroOffsetZ());
Serial.println();
}
void loop()
{
Vector rawGyro = mpu.readRawGyro();
Vector normGyro = mpu.readNormalizeGyro();
Serial.print(" Xraw = ");
Serial.print(rawGyro.XAxis);
Serial.print(" Yraw = ");
Serial.print(rawGyro.YAxis);
Serial.print(" Zraw = ");
Serial.println(rawGyro.ZAxis);
Serial.print(" Xnorm = ");
Serial.print(normGyro.XAxis);
Serial.print(" Ynorm = ");
Serial.print(normGyro.YAxis);
Serial.print(" Znorm = ");
Serial.println(normGyro.ZAxis);
delay(10);
}
/*
MPU6050 Triple Axis Gyroscope & Accelerometer. Simple Gyroscope Example.
Read more: http://www.jarzebski.pl/arduino/czujniki-i-sensory/3-osiowy-zyroskop-i-akcelerometr-mpu6050.html
GIT: https://github.com/jarzebski/Arduino-MPU6050
Web: http://www.jarzebski.pl
(c) 2014 by Korneliusz Jarzebski
*/
#include <Wire.h>
#include <MPU6050.h>
MPU6050 mpu;
void setup()
{
Serial.begin(115200);
// Initialize MPU6050
Serial.println("Initialize MPU6050");
while(!mpu.begin(MPU6050_SCALE_2000DPS, MPU6050_RANGE_2G))
{
Serial.println("Could not find a valid MPU6050 sensor, check wiring!");
delay(500);
}
// If you want, you can set gyroscope offsets
// mpu.setGyroOffsetX(155);
// mpu.setGyroOffsetY(15);
// mpu.setGyroOffsetZ(15);
// Calibrate gyroscope. The calibration must be at rest.
// If you don't want calibrate, comment this line.
mpu.calibrateGyro();
// Set threshold sensivty. Default 3.
// If you don't want use threshold, comment this line or set 0.
// mpu.setThreshold(3);
// Check settings
checkSettings();
}
void checkSettings()
{
Serial.println();
Serial.print(" * Sleep Mode: ");
Serial.println(mpu.getSleepEnabled() ? "Enabled" : "Disabled");
Serial.print(" * Clock Source: ");
switch(mpu.getClockSource())
{
case MPU6050_CLOCK_KEEP_RESET: Serial.println("Stops the clock and keeps the timing generator in reset"); break;
case MPU6050_CLOCK_EXTERNAL_19MHZ: Serial.println("PLL with external 19.2MHz reference"); break;
case MPU6050_CLOCK_EXTERNAL_32KHZ: Serial.println("PLL with external 32.768kHz reference"); break;
case MPU6050_CLOCK_PLL_ZGYRO: Serial.println("PLL with Z axis gyroscope reference"); break;
case MPU6050_CLOCK_PLL_YGYRO: Serial.println("PLL with Y axis gyroscope reference"); break;
case MPU6050_CLOCK_PLL_XGYRO: Serial.println("PLL with X axis gyroscope reference"); break;
case MPU6050_CLOCK_INTERNAL_8MHZ: Serial.println("Internal 8MHz oscillator"); break;
}
Serial.print(" * Gyroscope: ");
switch(mpu.getScale())
{
case MPU6050_SCALE_2000DPS: Serial.println("2000 dps"); break;
case MPU6050_SCALE_1000DPS: Serial.println("1000 dps"); break;
case MPU6050_SCALE_500DPS: Serial.println("500 dps"); break;
case MPU6050_SCALE_250DPS: Serial.println("250 dps"); break;
}
Serial.print(" * Gyroscope offsets: ");
Serial.print(mpu.getGyroOffsetX());
Serial.print(" / ");
Serial.print(mpu.getGyroOffsetY());
Serial.print(" / ");
Serial.println(mpu.getGyroOffsetZ());
Serial.println();
}
void loop()
{
Vector rawGyro = mpu.readRawGyro();
Vector normGyro = mpu.readNormalizeGyro();
Serial.print(" Xraw = ");
Serial.print(rawGyro.XAxis);
Serial.print(" Yraw = ");
Serial.print(rawGyro.YAxis);
Serial.print(" Zraw = ");
Serial.println(rawGyro.ZAxis);
Serial.print(" Xnorm = ");
Serial.print(normGyro.XAxis);
Serial.print(" Ynorm = ");
Serial.print(normGyro.YAxis);
Serial.print(" Znorm = ");
Serial.println(normGyro.ZAxis);
delay(10);
}
Functions Used in Gyroscope Sketch
1. mpu.readRawGyro()
- This function gives the decimal equivalent of the 16-bit values of the gyroscope rotation in the X, Y and Z directions.
- This does not give the value of gyroscope parameters in dps (degrees per second) units.
2. mpu.readNormalizeGyro()
- This function gives the value of the gyroscope parameters in the X, Y and Z directions in dps units.
- It takes into consideration the scale setting chosen for gyroscope and the corresponding sensitivity. Using this it gives gyroscope rotation in dps units.
1. mpu.readRawGyro()
- This function gives the decimal equivalent of the 16-bit values of the gyroscope rotation in the X, Y and Z directions.
- This does not give the value of gyroscope parameters in dps (degrees per second) units.
2. mpu.readNormalizeGyro()
- This function gives the value of the gyroscope parameters in the X, Y and Z directions in dps units.
- It takes into consideration the scale setting chosen for gyroscope and the corresponding sensitivity. Using this it gives gyroscope rotation in dps units.
Sketch For Roll, Pitch and Yaw Measurement Using Gyroscope
/*
MPU6050 Triple Axis Gyroscope & Accelerometer. Pitch & Roll & Yaw Gyroscope Example.
Read more: http://www.jarzebski.pl/arduino/czujniki-i-sensory/3-osiowy-zyroskop-i-akcelerometr-mpu6050.html
GIT: https://github.com/jarzebski/Arduino-MPU6050
Web: http://www.jarzebski.pl
(c) 2014 by Korneliusz Jarzebski
*/
#include <Wire.h>
#include <MPU6050.h>
MPU6050 mpu;
// Timers
unsigned long timer = 0;
float timeStep = 0.01;
// Pitch, Roll and Yaw values
float pitch = 0;
float roll = 0;
float yaw = 0;
void setup()
{
Serial.begin(115200);
// Initialize MPU6050
while(!mpu.begin(MPU6050_SCALE_2000DPS, MPU6050_RANGE_2G))
{
Serial.println("Could not find a valid MPU6050 sensor, check wiring!");
delay(500);
}
// Calibrate gyroscope. The calibration must be at rest.
// If you don't want calibrate, comment this line.
mpu.calibrateGyro();
// Set threshold sensivty. Default 3.
// If you don't want use threshold, comment this line or set 0.
// mpu.setThreshold(3);
}
void loop()
{
timer = millis();
// Read normalized values
Vector norm = mpu.readNormalizeGyro();
// Calculate Pitch, Roll and Yaw
pitch = pitch + norm.YAxis * timeStep;
roll = roll + norm.XAxis * timeStep;
yaw = yaw + norm.ZAxis * timeStep;
// Output raw
Serial.print(" Pitch = ");
Serial.print(pitch);
Serial.print(" Roll = ");
Serial.print(roll);
Serial.print(" Yaw = ");
Serial.println(yaw);
// Wait to full timeStep period
delay((timeStep*1000) - (millis() - timer));
}
/*
MPU6050 Triple Axis Gyroscope & Accelerometer. Pitch & Roll & Yaw Gyroscope Example.
Read more: http://www.jarzebski.pl/arduino/czujniki-i-sensory/3-osiowy-zyroskop-i-akcelerometr-mpu6050.html
GIT: https://github.com/jarzebski/Arduino-MPU6050
Web: http://www.jarzebski.pl
(c) 2014 by Korneliusz Jarzebski
*/
#include <Wire.h>
#include <MPU6050.h>
MPU6050 mpu;
// Timers
unsigned long timer = 0;
float timeStep = 0.01;
// Pitch, Roll and Yaw values
float pitch = 0;
float roll = 0;
float yaw = 0;
void setup()
{
Serial.begin(115200);
// Initialize MPU6050
while(!mpu.begin(MPU6050_SCALE_2000DPS, MPU6050_RANGE_2G))
{
Serial.println("Could not find a valid MPU6050 sensor, check wiring!");
delay(500);
}
// Calibrate gyroscope. The calibration must be at rest.
// If you don't want calibrate, comment this line.
mpu.calibrateGyro();
// Set threshold sensivty. Default 3.
// If you don't want use threshold, comment this line or set 0.
// mpu.setThreshold(3);
}
void loop()
{
timer = millis();
// Read normalized values
Vector norm = mpu.readNormalizeGyro();
// Calculate Pitch, Roll and Yaw
pitch = pitch + norm.YAxis * timeStep;
roll = roll + norm.XAxis * timeStep;
yaw = yaw + norm.ZAxis * timeStep;
// Output raw
Serial.print(" Pitch = ");
Serial.print(pitch);
Serial.print(" Roll = ");
Serial.print(roll);
Serial.print(" Yaw = ");
Serial.println(yaw);
// Wait to full timeStep period
delay((timeStep*1000) - (millis() - timer));
}
Sketch For Simple Temperature Measurement
/*
MPU6050 Triple Axis Gyroscope & Accelerometer. Temperature Example.
Read more: http://www.jarzebski.pl/arduino/czujniki-i-sensory/3-osiowy-zyroskop-i-akcelerometr-mpu6050.html
GIT: https://github.com/jarzebski/Arduino-MPU6050
Web: http://www.jarzebski.pl
(c) 2014 by Korneliusz Jarzebski
*/
#include <Wire.h>
#include <MPU6050.h>
MPU6050 mpu;
void setup()
{
Serial.begin(115200);
Serial.println("Initialize MPU6050");
while(!mpu.begin(MPU6050_SCALE_2000DPS, MPU6050_RANGE_2G))
{
Serial.println("Could not find a valid MPU6050 sensor, check wiring!");
delay(500);
}
}
void loop()
{
float temp = mpu.readTemperature();
Serial.print(" Temp = ");
Serial.print(temp);
Serial.println(" *C");
delay(500);
}
/*
MPU6050 Triple Axis Gyroscope & Accelerometer. Temperature Example.
Read more: http://www.jarzebski.pl/arduino/czujniki-i-sensory/3-osiowy-zyroskop-i-akcelerometr-mpu6050.html
GIT: https://github.com/jarzebski/Arduino-MPU6050
Web: http://www.jarzebski.pl
(c) 2014 by Korneliusz Jarzebski
*/
#include <Wire.h>
#include <MPU6050.h>
MPU6050 mpu;
void setup()
{
Serial.begin(115200);
Serial.println("Initialize MPU6050");
while(!mpu.begin(MPU6050_SCALE_2000DPS, MPU6050_RANGE_2G))
{
Serial.println("Could not find a valid MPU6050 sensor, check wiring!");
delay(500);
}
}
void loop()
{
float temp = mpu.readTemperature();
Serial.print(" Temp = ");
Serial.print(temp);
Serial.println(" *C");
delay(500);
}
No comments:
Post a Comment